世界の栗の生産量は240万tで、過去20年間で約2.5倍に増加。そのうち中国が約77%を占めます。国内の生産量は15,700tで、茨城県(19.7%)、熊本県(17.9%)、愛媛県(8.6%)で約45%を占めます。国内の栗需要は多く、中国から2,745t(約10億円)、韓国から1,512t(約14億円)輸入している現状です。
国内産地を維持するには、作業の省力化・軽労化が必要になるため、自律型の収穫・運搬ロボットの開発を私たちは研究しています。
栗の従事者は、高齢化や減少が現実化しており、人手・後継者不足が問題になっています。
収穫・運搬の機械化はほとんど進んでいません。
 慣行(手取り):火ばさみ・トング
慣行(手取り):火ばさみ・トング
 慣行(手取り):栗用ゴム手袋
慣行(手取り):栗用ゴム手袋
 機械:背負・吸引式
機械:背負・吸引式
収穫する栗の木の順番をプログラムすることで、自己位置を推定しながら、栗の木に近づき、収穫することができる。
カメラによるARマーカの認識
測域センサによる周辺状況の把握
白黒のパターンから成る画像で,ロボットが栗の木の位置を認識するためのランドマークとして用いる。
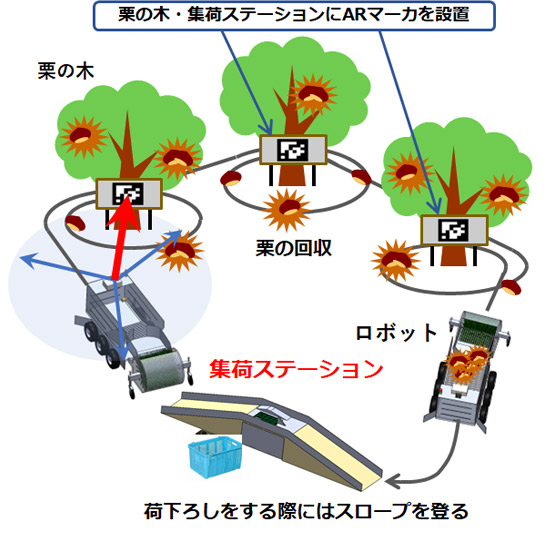
栗園における収穫・運搬の無人化・軽労化、労働時間の削減、並びに農業機械の電気化の推進を目的とした完全自律型の収穫・運搬ロボットの開発
①イガ付・イガ無し、大きさ・形に関係なく、すべての品種に対応できる
②収穫・運搬はGPS機能や人の関与が不要な自律型ロボットである
③緩やかな傾斜地や凸凹の地面を安定的に走行できる(2㎞/h:ゆっくり歩く程度)
④収穫した栗やイガは指定した場所に運搬できる
⑤自動で動き回り、作業性が飛躍的に向上し、収穫時間が短縮できる
⑥スマートフォン等で簡単にロボットを制御できる
⑦手動での運転もできる
⑧夜間や早朝も収穫できることで、早生品種の品質劣化やイノシシ被害が減り
⇒収量2割アップ・販売価格1割アップが期待できる
⑨収穫部は取り外し可能で、運搬用台車は冬の剪定・夏秋の施肥等に活用できる
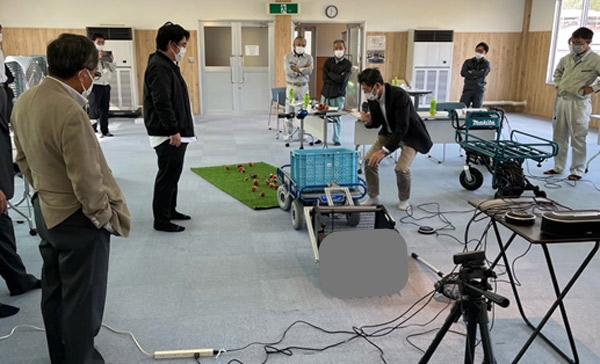 2022年度中間報告会(山江村役場、11月10日)でのコンソーシアムメンバーによる栗ロボ試作機についての意見交換
2022年度中間報告会(山江村役場、11月10日)でのコンソーシアムメンバーによる栗ロボ試作機についての意見交換